GSoC 2025 - Week 16
Weekly Updates
For this week, we got the application working in qemu environment, which required us to create ldconfig to ros2 libraries which exists in a separate path (/opt/ros/humble/lib), so the application is running alright with no issues so far, and even communicates with ros2. This was tested on both trout, and master branch with flutter workspace_automation env (v2.0 branch).
mkdir /etc/ld.so.conf.d echo ‘/opt/ros/humble/lib’ | tee /etc/ld.so.conf.d/ros2.conf ldconfig
The above were the steps I had to do, so for the same I pushed a patch on gerrit. It’s tested and works!
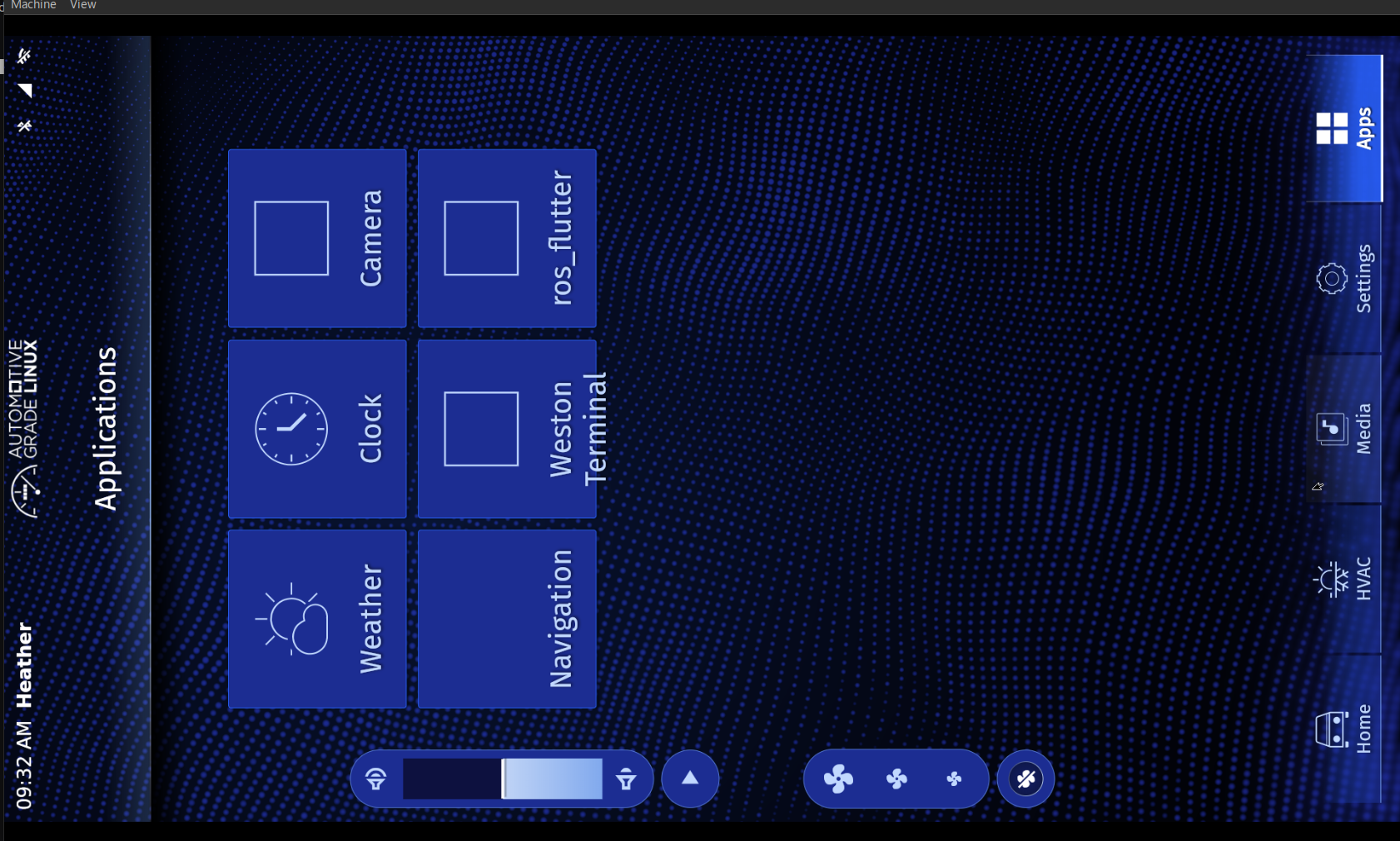
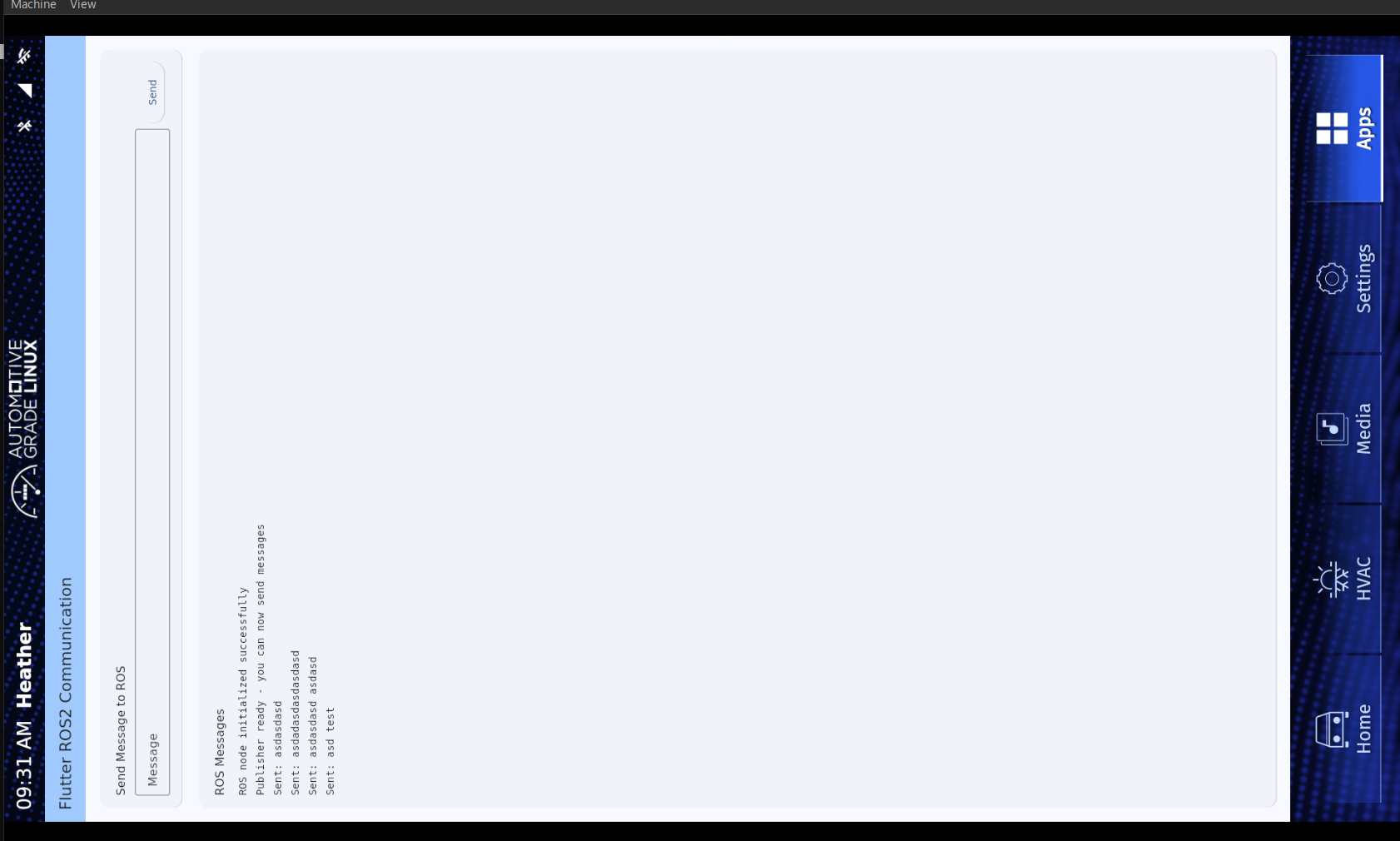
Additionally to this, I was able to get the flutter-app recipe working and the app installed on AGL. The app runs but I am not able to get ros2 communication, maybe we need to debug that part. I will attach some screenshots for the same.
Images
As for ROS2, I was planning to talk to Rob regarding some references I can find which can help me in running ROS and a camera feed with object detection.
- https://www.youtube.com/watch?v=XqibXP4lwgA
- https://www.youtube.com/watch?v=CajBysjKKUk
- https://www.youtube.com/watch?v=GSZ6z3GQk7Y
So mostly, my plan for this week is to fix the flutter application and make the code readable, since everything currently is in a single file, so I will try to separate out the utilities and Theming parts. This is the patch for application https://gerrit.automotivelinux.org/gerrit/c/AGL/meta-agl-devel/+/31175 and I would like to keep it on the gerrit as of now, until some base application part is complete where the code is readable for others.
Get Involved
Stay tuned for the detailed technical deep-dives in the upcoming blog posts. I am planning to include examples, code, etc, such that anyone can follow along with it.
Have questions about automotive software development or want to collaborate on open-source automotive projects? Reach out to me on my email
Next: GSoC 2025 - Week 17
Journey: GSoC 2025 Journey
Built, broken, and dumped by Saalim Find me on: GitHub → danascape LinkedIn → saalim-quadri YouTube → @danascape Twitter (X) → @danascape Got thoughts, feedback, or just want to drop a hi? → saalim.priv@gmail.com